Note
Go to the end to download the full example code.
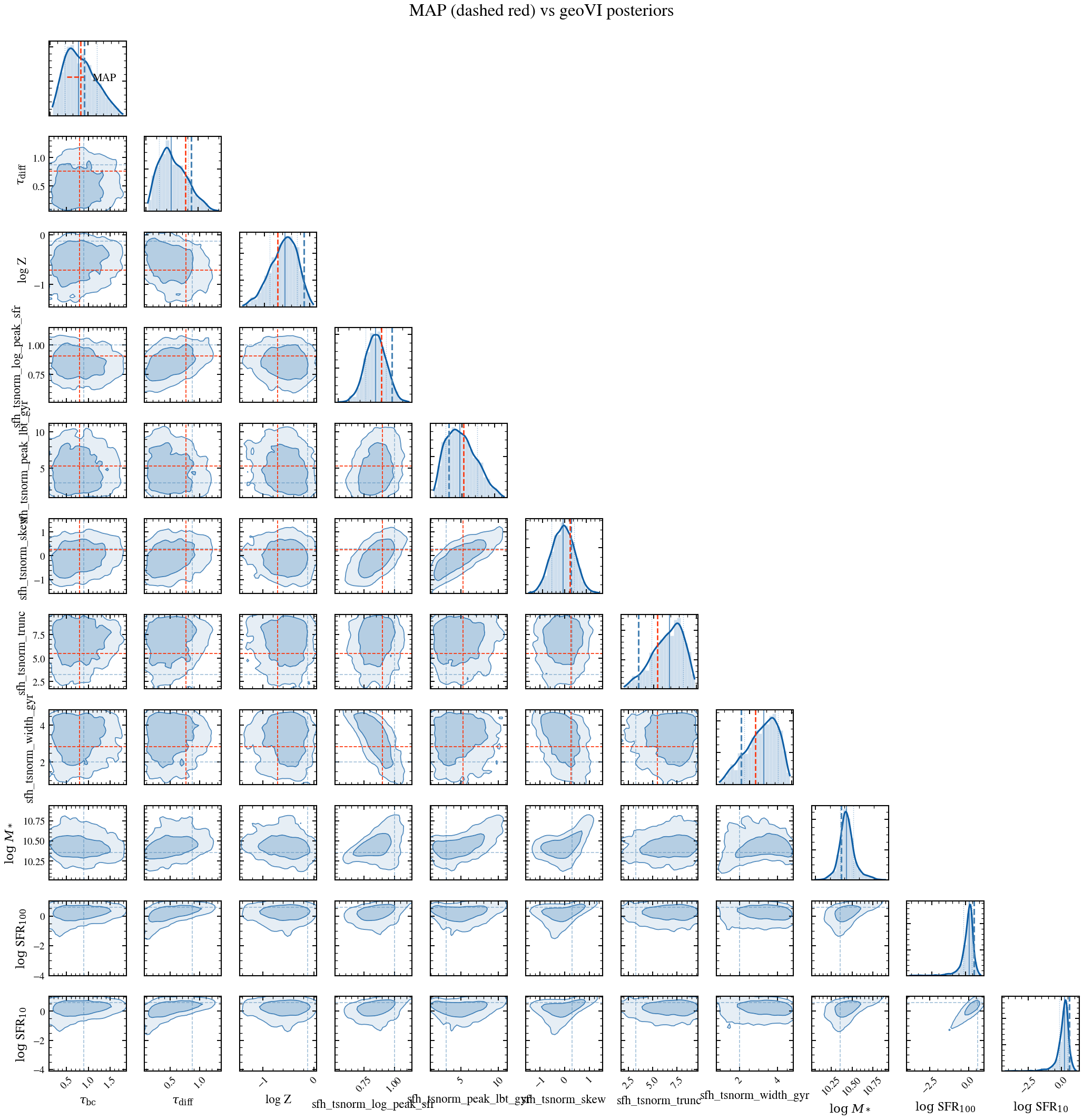
MAP vs geoVI Posterior Comparison¶
Compares point-estimate (MAP) and variational (vi/geoVI) inference on mock 5-band photometry. Overlays posteriors as a corner plot.
from pathlib import Path
import jax
import matplotlib.pyplot as plt
import numpy as np
jax.config.update("jax_enable_x64", True)
from tengri import (
Fitter,
Fixed,
Observation,
Parameters,
Photometry,
SEDModel,
Uniform,
load_ssp_data,
safe_corner,
setup_style,
)
setup_style()
# --- Data ---
def _find_ssp():
"""Locate SSP data from project root or docs/ (sphinx-gallery) cwd."""
name = "ssp_prsc_miles_chabrier_wNE_logGasU-3.0_logGasZ0.0.h5"
for p in [
Path("data") / name,
Path("../data") / name,
Path("../../data") / name,
Path("../../../data") / name,
]:
if p.exists():
return str(p)
return None
SSP_PATH = _find_ssp()
if SSP_PATH is None:
raise FileNotFoundError("SSP data not found — skipping example")
ssp = load_ssp_data(SSP_PATH)
obs = Observation(
photometry=Photometry.from_names(["sdss_u", "sdss_g", "sdss_r", "sdss_i", "sdss_z"])
)
# --- SEDModel ---
spec = Parameters(
sfh_tsnorm_log_peak_sfr=Uniform(-1.0, 2.5),
sfh_tsnorm_peak_lbt_gyr=Uniform(0.5, 12.0),
sfh_tsnorm_width_gyr=Uniform(0.3, 5.0),
sfh_tsnorm_skew=Uniform(-3.0, 3.0),
sfh_tsnorm_trunc=Uniform(1.0, 10.0),
met_logzsol=Uniform(-2.0, 0.2),
dust_tau_bc=Uniform(0.0, 2.0),
dust_tau_diff=Uniform(0.0, 1.5),
dust_slope=Fixed(-0.7),
redshift=Fixed(0.1),
mean_sfh_type="tsnorm",
)
model = SEDModel(spec, ssp, observation=obs)
# --- Mock photometry (star-forming galaxy) ---
key = jax.random.PRNGKey(42)
true_params = spec.sample(key)
true_params["sfh_tsnorm_peak_lbt_gyr"] = 3.0
true_params["sfh_tsnorm_width_gyr"] = 2.0
true_params["sfh_tsnorm_log_peak_sfr"] = 1.0
true_params["sfh_tsnorm_skew"] = 0.3 # Positive skew = recent star formation
mock = model.mock(true_params, snr=20.0, key=key)
# --- Fit: MAP ---
fitter = Fitter(model, mock.flux_obs, mock.noise, data_type="photometry")
result_map = fitter.run("map", n_steps=300, verbose=False)
# --- Fit: vi/geoVI (quick settings) ---
fitter.compile(verbose=False)
result_geovi = fitter.run(
"vi",
n_iterations=10,
n_samples=4,
n_posterior_samples=2000,
verbose=False,
)
# --- Figure: corner comparison ---
fig = safe_corner(result_geovi, truths=true_params)
if fig is not None:
# Mark MAP point
map_vals = [float(result_map.params[p]) for p in spec.free_params]
n = len(spec.free_params)
# Reshape axes to a square grid; safe_corner creates n_params x n_params axes
n_axes = int(np.sqrt(len(fig.axes)))
axes = np.array(fig.axes).reshape(n_axes, n_axes) if n_axes > 0 else np.array(fig.axes)
for i in range(n):
if i < n_axes:
axes[i, i].axvline(map_vals[i], color="C3", ls="--", lw=1.2, label="MAP")
for j in range(i):
if j < n_axes:
axes[i, j].axhline(map_vals[i], color="C3", ls="--", lw=0.8)
axes[i, j].axvline(map_vals[j], color="C3", ls="--", lw=0.8)
if n_axes > 0:
axes[0, 0].legend(fontsize=10)
fig.suptitle("MAP (dashed red) vs geoVI posteriors", y=1.02)
plt.savefig(
"plot_method_comparison.png",
dpi=150,
bbox_inches="tight",
)
# --- SFH: truth vs MAP vs geoVI ---
sfh_true = model.predict_sfh(true_params)
sfh_map = model.predict_sfh(result_map.params)
sfh_geovi = model.predict_sfh(result_geovi.params)
t_gyr = np.array(sfh_true["t_gyr"])
mask = t_gyr < 5.0
fig_sfh, ax_sfh = plt.subplots(figsize=(6, 3.5))
ax_sfh.plot(t_gyr[mask], np.array(sfh_true["sfr_mean"])[mask], "k-", lw=2, label="Truth")
ax_sfh.plot(
t_gyr[mask], np.array(sfh_map["sfr_mean"])[mask], "--", color="C3", lw=1.5, label="MAP"
)
ax_sfh.plot(
t_gyr[mask], np.array(sfh_geovi["sfr_mean"])[mask], "--", color="C0", lw=1.5, label="geoVI"
)
ax_sfh.set_xlabel("Lookback time [Gyr]")
ax_sfh.set_ylabel("SFR [Msun/yr]")
ax_sfh.set_title("SFH recovery: MAP vs geoVI")
ax_sfh.legend(fontsize=10, frameon=False)
fig_sfh.tight_layout()
plt.show()